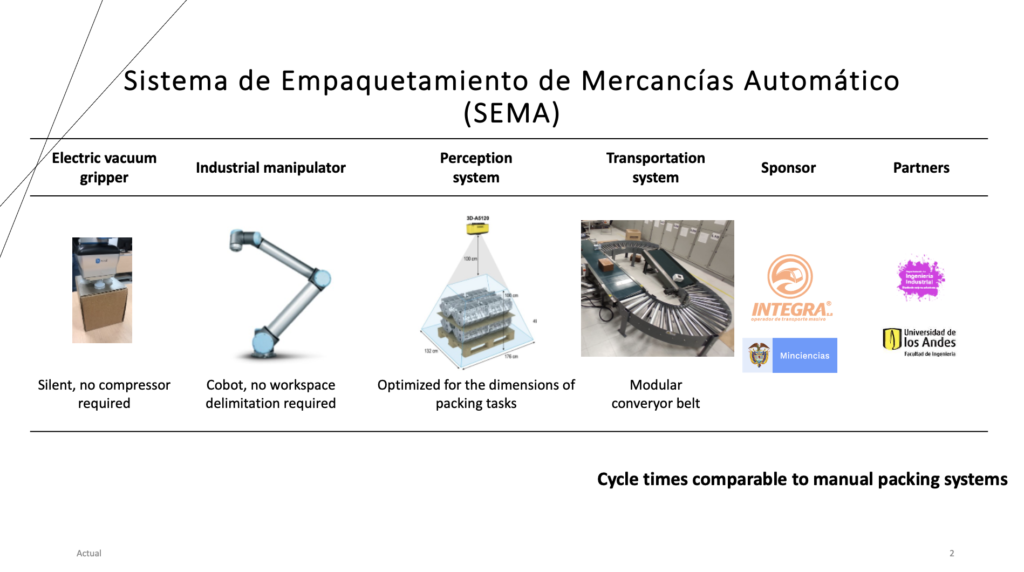
SISTEMA DE EMPAQUETAMIENTO DE MERCANCÍAS AUTOMÁTICO SEMA
Desde el área de Investigación, Desarrollo e Innovación (I+D+i) de Integra S.A., reconocemos la importancia de realizar aportes significativos a la industria a través de proyectos innovadores. Uno de nuestros desarrollos más destacados es el Sistema de Empaquetamiento de Mercancías Automático, conocido como SEMA.
Este proceso de empaquetamiento automático de mercancías comienza con el núcleo sistemático de Visión, el cual utiliza algoritmos de Deep Learning para identificar las cajas a través de cámaras. Mediante este proceso, se estiman las dimensiones de la caja (ancho, alto y largo) y se obtienen los vértices y la velocidad a la que se desplaza sobre la banda transportadora. Estas variables se representan mediante vectores de 3×6.
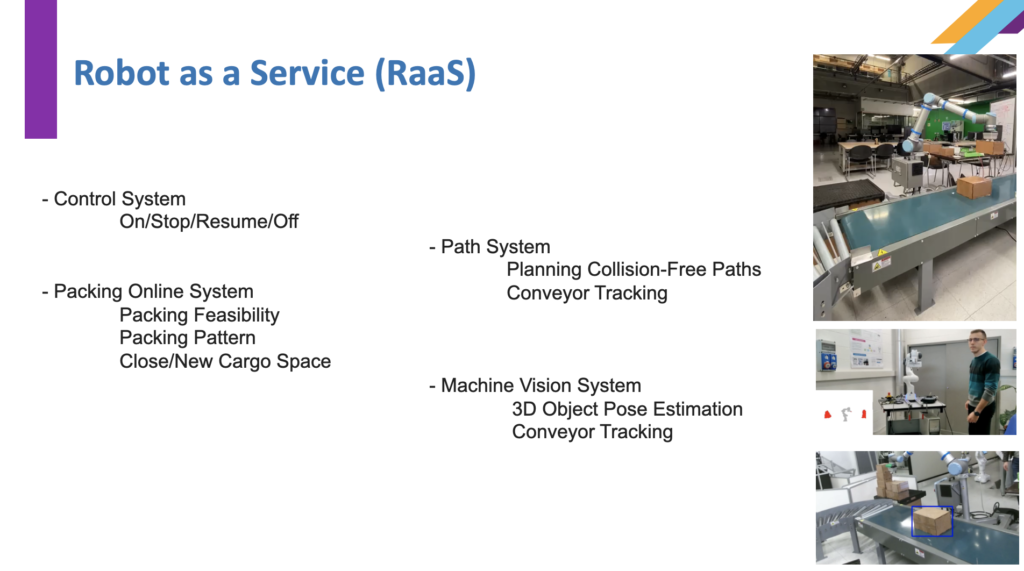
Una vez que la caja es identificada, se llevan a cabo dos actividades en paralelo. Por un lado, el núcleo sistemático de Packing utiliza las dimensiones de la caja para ejecutar un algoritmo de empaquetamiento, el cual genera una lista de posibles ubicaciones en el pallet. Esta lista tiene un tamaño de nx6. Por otro lado, el núcleo sistemático de Trayectorias utiliza la información de los vértices y las velocidades proporcionadas por el núcleo de Visión para ubicar el Gripper (pinza) en la parte superior de la caja. El Gripper desciende por la caja, la succiona y se levanta con ella, mientras el núcleo de Trayectorias traza una ruta desde el punto de recogida en la banda hasta el punto de destino en la posición final del pallet. Durante este proceso, el núcleo de Visión proporciona un vector de 6xn que representa el espacio real en el que se encuentra el pallet en ese momento, mientras que el núcleo de Packing envía una lista de posiciones posibles para ubicar la caja en el pallet. Para evitar obstáculos durante la trayectoria, se realiza una caracterización del espacio real, es decir, se evalúa el estado del pallet en un instante de tiempo para identificar posibles obstrucciones que deben evitarse.
Al ejecutar el algoritmo de planificación, se genera una lista de posiciones articulares que define la ruta por la cual el brazo robótico transportará la caja en un tiempo determinado. Estas posiciones se envían al núcleo de Visión para evitar que el robot obstruya la cámara mientras se está identificando el espacio real del pallet.
Una vez que el manipulador con la caja se encuentra sobre el pallet, el núcleo de Trayectorias, utilizando la cinemática inversa del manipulador, verifica si se puede alcanzar la posición establecida para ubicar la caja. En caso contrario, se selecciona otra posición posible hasta lograr colocar la caja correctamente. Una vez que la caja se encuentra en su posición final sobre el pallet, se envían las coordenadas de esta posición a Packing para actualizar el espacio virtual, es decir, el estado en el que se encuentra el pallet en ese instante de tiempo. Para poder ubicar la siguiente caja, el núcleo de Visión caracteriza el nuevo espacio real del pallet y lo compara con el espacio virtual establecido por el núcleo de Packing, con el fin de validar que sean similares.
Este proceso de paletizado automático se repite caja por caja hasta completar todos los niveles de un pallet. El desarrollo de SEMA y sus componentes de Visión, Packing y Trayectorias representa un avance significativo en la automatización del empaquetamiento de mercancías, brindando eficiencia y precisión en el proceso. En Integra S.A., nos enorgullece liderar la vanguardia tecnológica y contribuir al progreso de la industria a través de proyectos de I+D+i como SEMA.
Resultados.
Cuatro artículos de investigación con calidad A1 los cuales han sido aceptados y publicados.
- Modeling and solving the endpoint cutting problem.
- A hybrid approach of simulation and metaheuristic for the polyhedra packing problem
- Metaheuristic algorithm for the location, routing and packing problem in the collection of recyclable waste
- A hybrid matheuristic approach for the vehicle routing problem with three-dimensional loading constraints
Un artículo de investigación con calidad A2 aceptado.
Formación de un estudiante de Doctorado.
Vinculación de 6 estudiantes de maestría en modalidad de jóvenes investigadores.
Asistencia a ponencias internacionales en eventos científicos en donde se presentaron los resultados obtenidos con los artículos publicados:
- European Conference on Operational Research EURO 2022 Finland.
- International Conference On Automation Science And Engineering (ICASE-22) Milan Italia.
- IEOM Society Manila Phillipines2023
- IEOM Society Lima Peru 2023
- ICFTE International Conference on Future of Teaching and Education, Vienna Austria 2023.
- IFORS Chile 2023